UR机器人关节损坏是一个常见的问题,可(kě)能(néng)会导致机器人无法正常工作。本文(wén)将介绍UR机器人关节损坏的原因和解决方法,帮助您更好地维护和管理(lǐ)UR机器人。
一、UR机器人关节损坏的原因
1. 机械故障:UR机器人的关节由一系列精密的机械部件组成,如電(diàn)机、齿轮、链条等。如果这些部件出现故障,可(kě)能(néng)会导致关节无法正常工作。
2. 電(diàn)气故障:UR机器人的关节使用(yòng)传感器和控制系统来实现精确的运动控制。如果这些電(diàn)气系统出现故障,可(kě)能(néng)会导致关节无法正常工作。
3. 过度使用(yòng):UR机器人如果長(cháng)时间使用(yòng),或者在超出其设计范围的情况下使用(yòng),可(kě)能(néng)会导致关节过度磨损或损坏。
4. 维护不当:UR机器人的关节需要定期进行维护和保养,如添加润滑剂、清洁机械部件等。如果维护不当,可(kě)能(néng)会导致关节损坏。
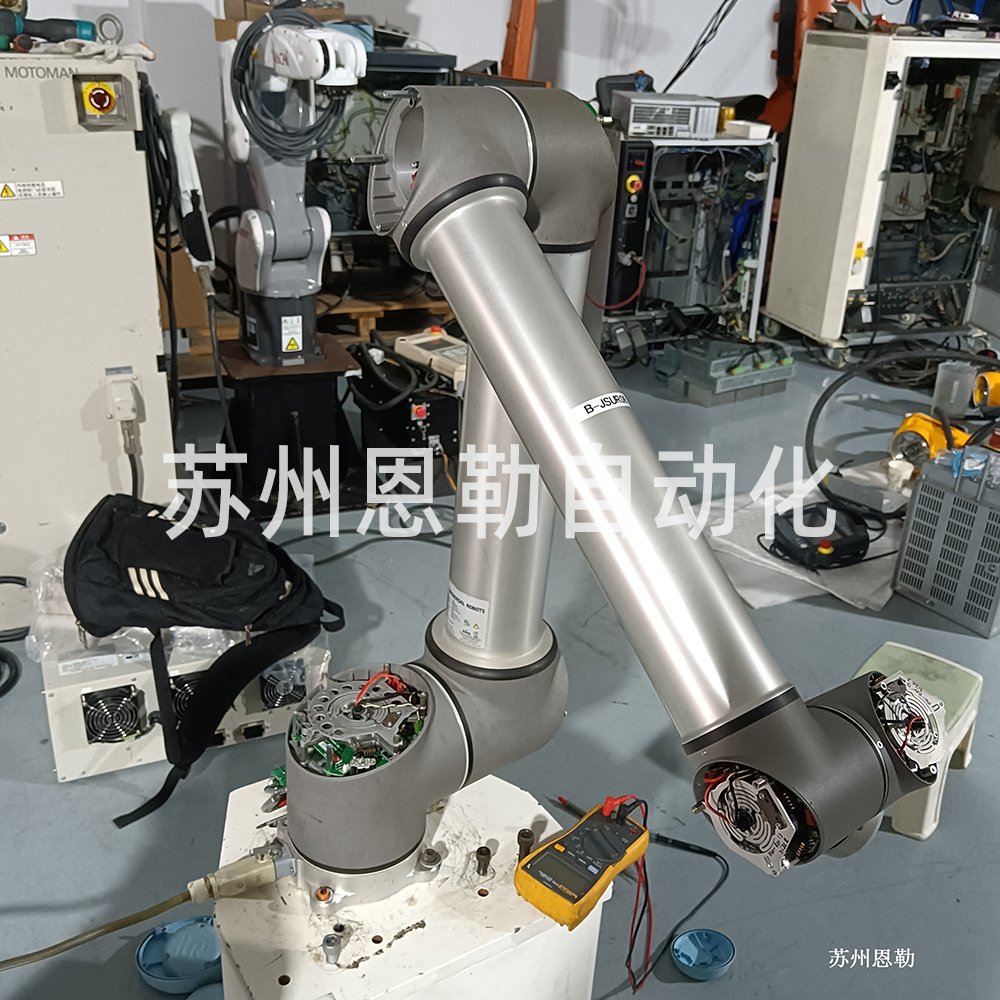
UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技有(yǒu)限公司 
UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技有(yǒu)限公司
二、UR机器人关节损坏的解决方法
1. 机械故障解决方法:对于机械故障,可(kě)以采取以下措施:
* 检查关节部件是否有(yǒu)松动或损坏,如有(yǒu)需要更换;
* 检查電(diàn)机、齿轮、链条等部件是否需要更换或维修;
* 给机械部件添加润滑剂,减少磨损。
2. 電(diàn)气故障解决方法:对于電(diàn)气故障,可(kě)以采取以下措施:
* 检查传感器、控制系统等是否有(yǒu)故障,如有(yǒu)需要更换;
* 检查電(diàn)線(xiàn)、電(diàn)缆等是否有(yǒu)破损或短路,如有(yǒu)需要更换;
* 定期对電(diàn)气系统进行维护和保养。
3. 过度使用(yòng)解决方法:对于过度使用(yòng),可(kě)以采取以下措施:
* 定期让UR机器人休息,避免長(cháng)时间连续工作;
* 避免在超出设计范围的情况下使用(yòng)UR机器人;
* 定期对关节部件进行检查和维护,及时发现并解决问题。
4. 维护不当解决方法:对于维护不当,可(kě)以采取以下措施:
* 學(xué)习并遵循UR机器人的使用(yòng)说明书,按照要求进行维护和保养;
* 注意观察UR机器人的运行状态,及时发现并解决问题;
* 定期对关节部件进行检查和维护,及时发现并解决问题。
UR机器人关节损坏维修更换——苏州恩勒自动化科(kē)技有(yǒu)限公司
总之,UR机器人关节损坏是一个常见的问题,但只要我们掌握了正确的解决方法,就可(kě)以有(yǒu)效地维护和管理(lǐ)UR机器人。在使用(yòng)过程中,要注意观察UR机器人的运行状态,及时发现并解决问题;同时也要定期对关节部件进行检查和维护,保证UR机器人的正常运行。






